Objectifs
Le but de la direction d’un véhicule Supermileage est simple : réduire la friction des roues contre la chaussée tout en permettant de garder un minimum de maniabilité du véhicule. Le troisième objectif, à ne pas négliger, est d’effectuer le tout avec le minimum de masse. La maniabilité inclue le respect d’un rayon de virage minimal (6m) ainsi qu’une distance de freinage minimale.
Démarche
Ces objectifs sont atteints en optimisant l’angle d’Ackermann ainsi que le carrossage, la chasse et le parallélisme des roues.
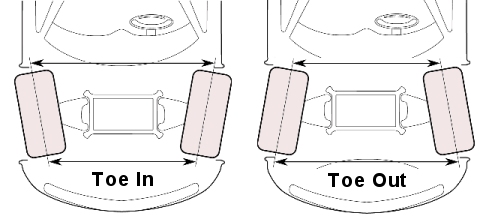
Figure 1: Parallélisme
Figure 2: Chasse
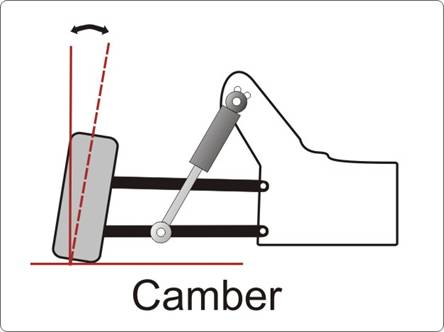
Figure 3: Carrossage
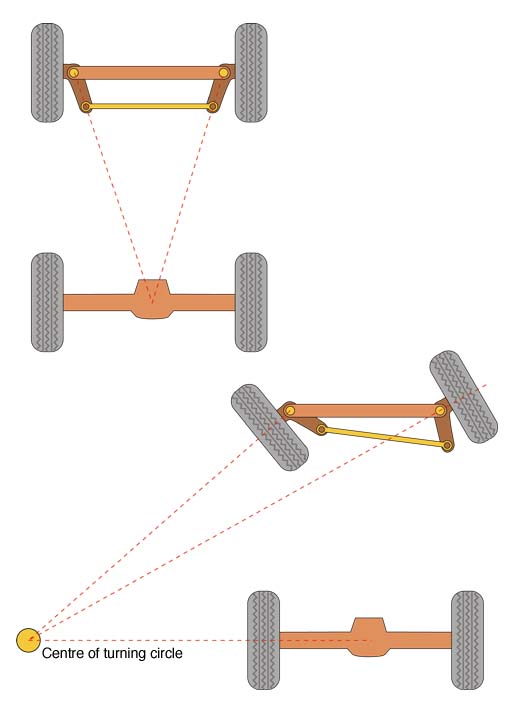
Figure 4: Angle d'Ackermann
Évidemment, le parallélisme doit être parfait pour éliminer les pertes en frictions des pneus. Les angles de chasse et de carrossage sont plus difficiles à cerner, tout étant une question de compromis. Un principe très simple permettant de déterminer l’angle d’Ackermann est illustré au schéma supérieur de la Figure 4 et l’effet de cet angle est présenté au schéma inférieur de la Figure 4. La réduction de masse est effectuée en choisissant soigneusement les matériaux de chaque pièces ainsi qu’en optimisant la géométrie de celles-ci. Le carbone et l’aluminium sont préconisés.
Résultats
Le système choisit est composé de blocs pivotants en aluminium reliés par une barre de carbone assurant le parallélisme.
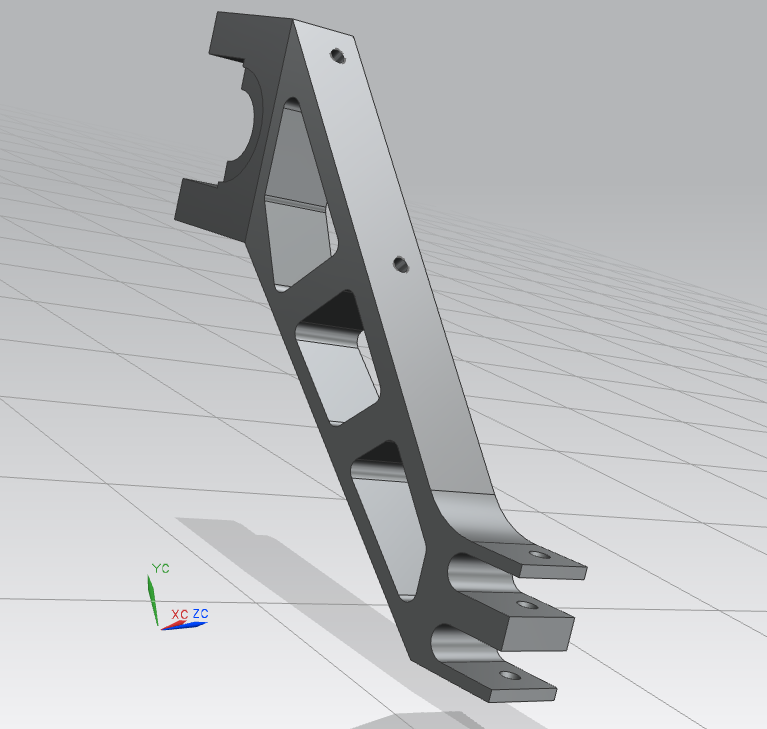
Figure 5: Bloc pivotant
Les roues sont fixées aux blocs par l’entremise des moyeux et les blocs sont fixés à la structure de carbone de la coque par deux joints à rotation libre. Comme leur nom l’indique, les blocs pivotants pivotent avec les roues pour permettre au véhicule de tourner. Le mouvement de rotation du guidon est transmis par un joint universel à un pivot qui transforme le mouvement en translation. La translation est amenée à l’extrémité d’un des blocs pivotants grâce à une autre barre de carbone. Le guidon et le pivot sont supportés par une même pièce de carbone assurant la rigidité de l’ensemble.
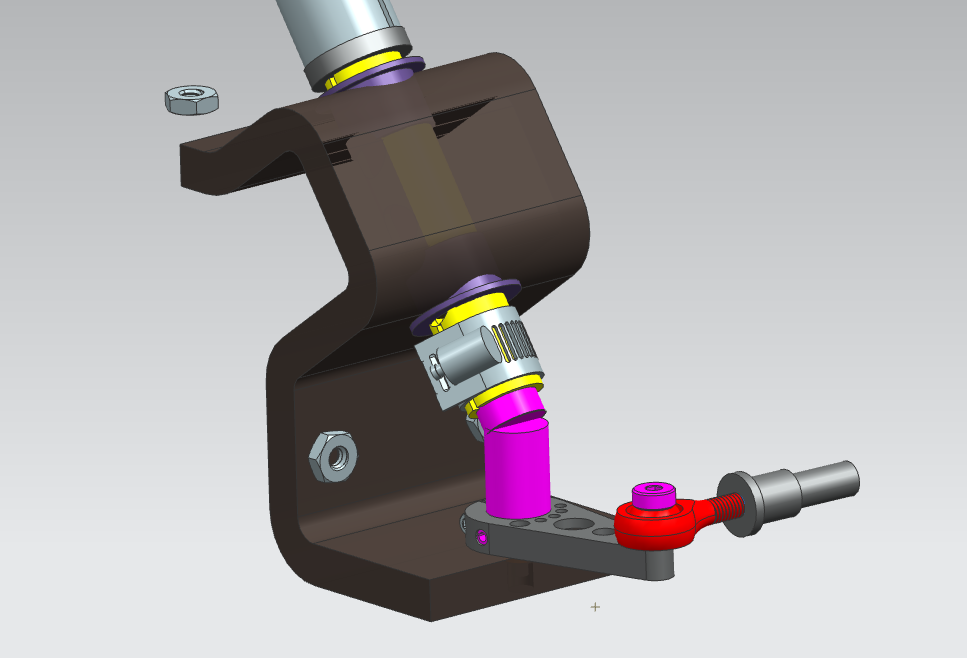
Figure 6: Support du guidon et du pivot
Le tout est illustré aux Figure 7: Vue explosée de la direction et Figure 8: Direction assemblée.
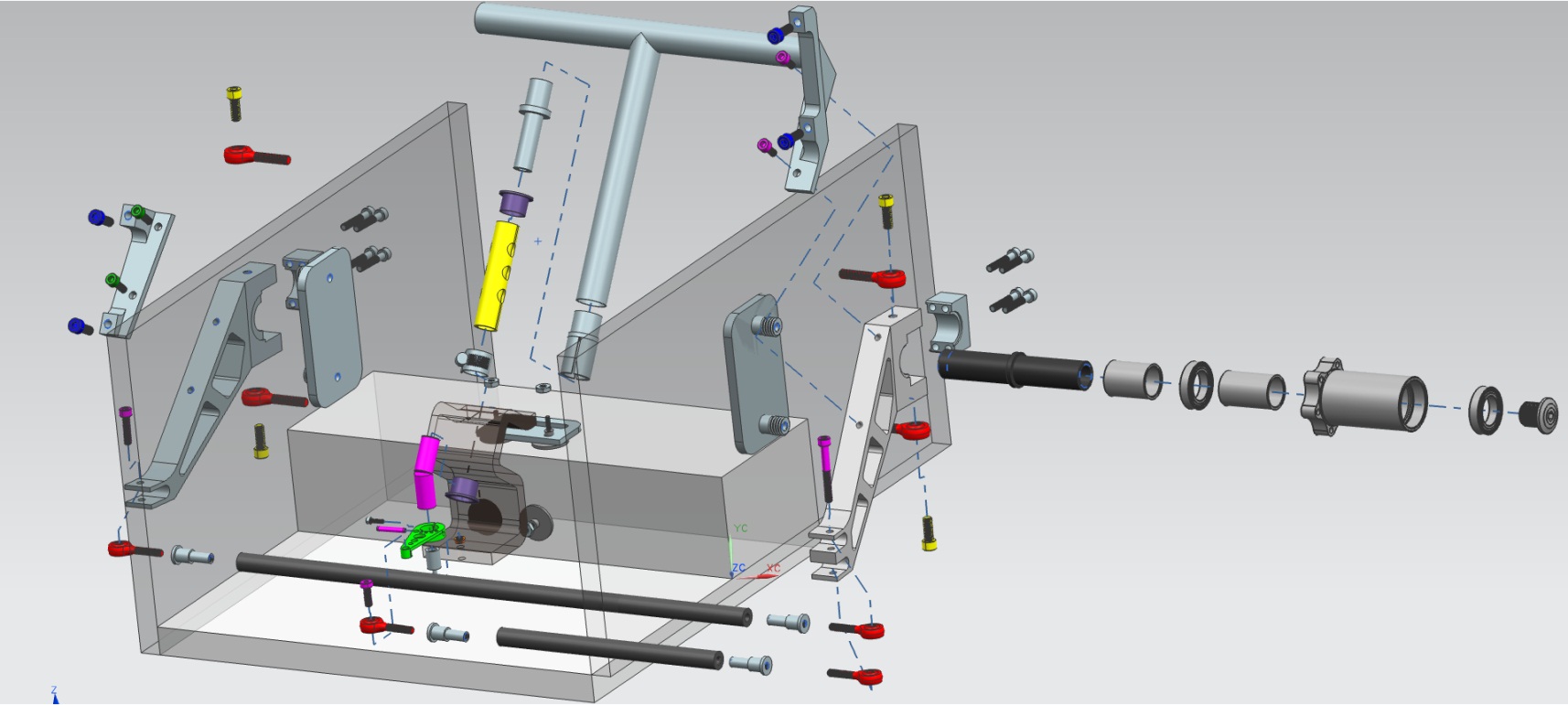
Figure 7: Vue explosée de la direction
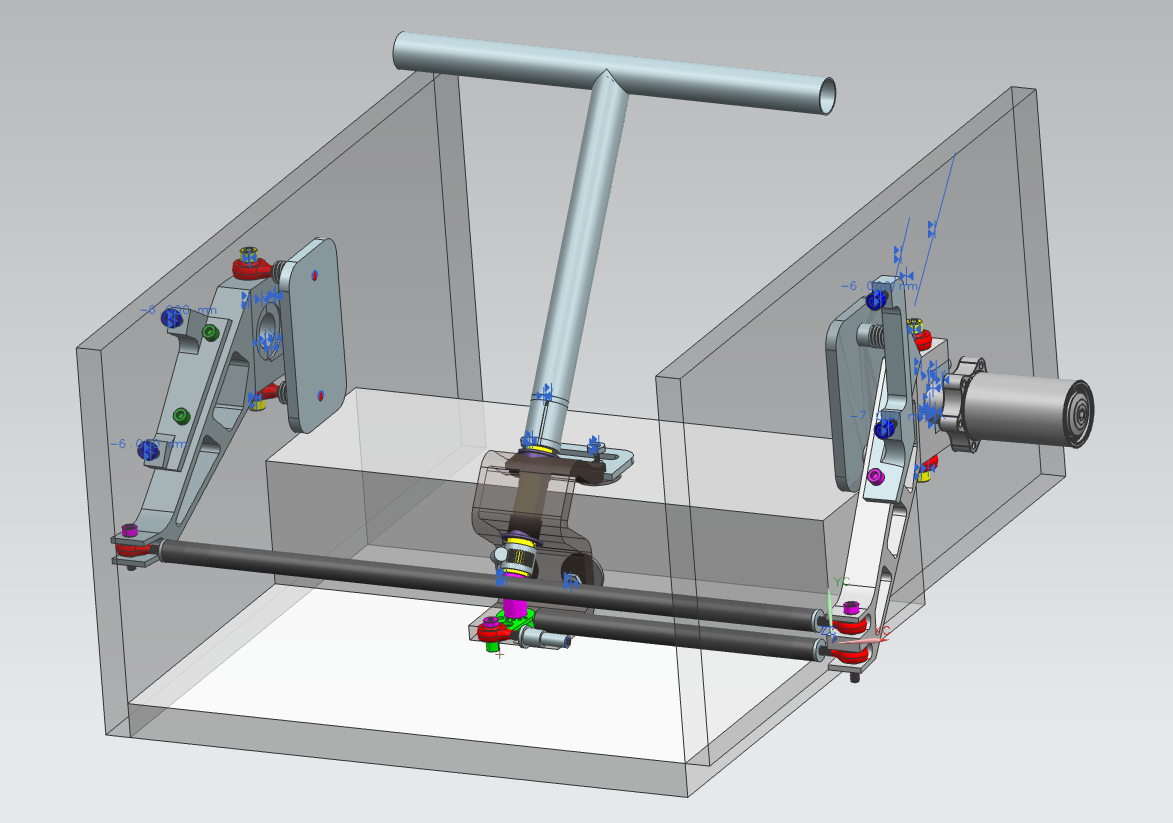
Figure 8: Direction assemblée
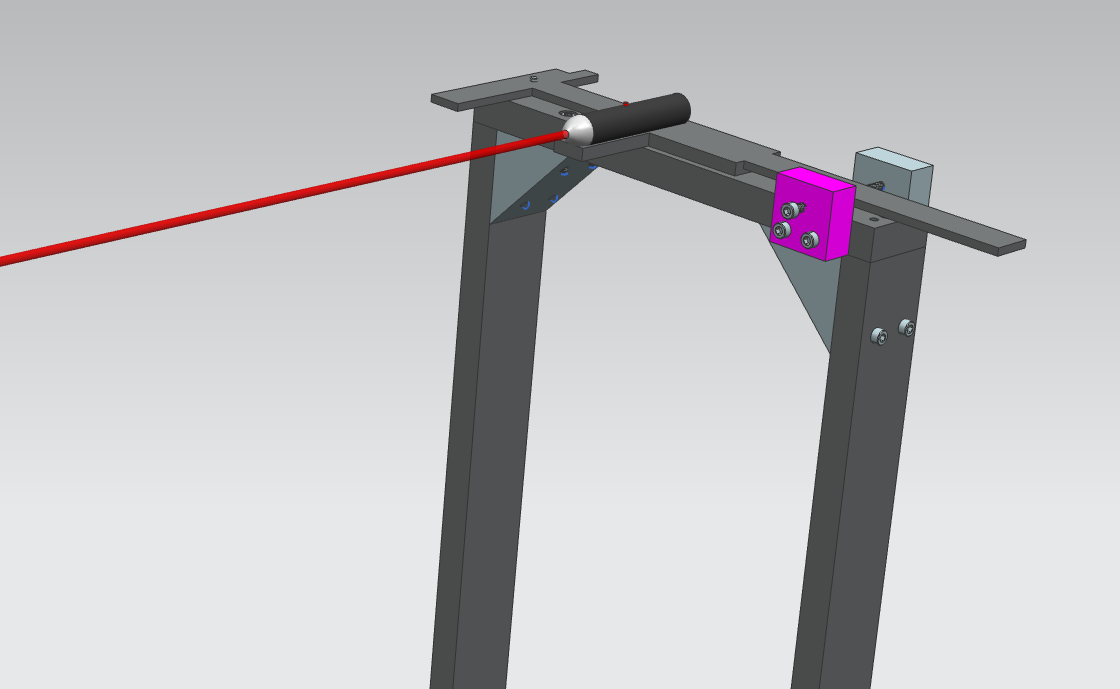
Le système d’alignement est mécanique pour les roues avant et optique pour les roues arrière.